Fig. 1
Fig. 1
Integrantes del grupo
|
Apellido y Nombre |
Rol o tarea |
|
Aimar Jorge |
Investigación |
|
Canessa Daniel |
Investigación y Coordinación General |
|
Collante Jorge |
Investigación y Ayudante de laboratorio |
|
Moscoloni Pablo |
Investigación |
|
Guido Martín |
Integración y Armado de Presentación |
|
Herrera Sergio |
Responsable del Lab |
Tabla de contenido del Informe
A. Introducción
A.1. Breve descripción ………………………………. Pág. 5
A.2. Ventajas de ………………………………. Pág. 5
A.3. Usos ………………………………. Pág. 5
A.4. Consideraciones generales …………………….…………. Pág. 6
B. Desarrollo del trabajo
B.1. Descripción del proyecto ………………………………. Pág. 9
B.2. Esquema Básico ………………………………. Pág. 10
B.3. Elementos de Adquisición de datos
B.3.1. Convertidores analógicos - digitales ……………............…. Pág. 10
B.3.2. Circuitos de captura y mantenimiento ...………….............… Pág. 10
B.3.3. Convers. anal. – digit. con comparadores ……………............… Pág. 11
B.3.4. Convers. anal. – digit. con contadores ……………..............… Pág. 12
B.3.5. Conversor D/A y buffers de salida ………….…………..............… Pág. 13
B.3.6. Conversor A/D con integrador ……….…………….............… Pág. 14
B.3.7. Conversor A/D con rampa única ……….………….............…… Pág. 14
B.4. Teorema del Muestreo
B.4.1. Enunciado ……….…………….............………… Pág. 15
B.4.2. Multiplexor ……….……………............………… Pág. 16
B.5 Software de adquisición y tratamiento de datos MATLAB
B.5.1. Descripción .……………….............……… Pág. 24
B.5.2. Componentes del Software .……………………...........… Pág. 24
B.5.3. Integración de adquisición y análisis .……………………… Pág. 25
B.5.4. La solución MATLAB para test y medición ……………… Pág. 25
B.5.5. Herramientas para test y medición .………………………............. Pág. 26
B.5.6. Data Acquisition Toolbox .…………………............…… Pág. 26
B.5.7. Instrument Control Toolbox .…………………............…… Pág. 26
B.5.8. Herramientas adicionales .…………………….............… Pág. 26
B.5.9. Interfaz con dispositivos externos .…………………….............… Pág. 26
B.5.10. Usos de MATLAB y los Data Acq. e Instr. Cont. Toolboxe........ Pág. 27
B.5.11.Productos para interfaz con dispositivos externo ……..............… Pág. 27
B.5.12.Análisis y visualización de datos .…………………............…… Pág. 28
B.5.13. Matemáticas y análisis punteros .………………….............…… Pág. 29
B.5.14. Gráficos descriptivos para explorar y presentar sus datos.......... Pág. 29
B.5.15. Toolboxes específicos de la aplicación .………….............…… Pág. 29
B.5.16. Procesado de señales ……….……………...........… Pág. 30
B.5.17. Wavelets ……….……….............……… Pág. 30
B.5.18. Identificación de sistemas ……….……….............……… Pág. 30
B.5.19. Redes neuronales ……….……….............……… Pág. 30
B.5.20. Desarrollo de algoritmos y modelos ……….……………… Pág. 30
B.5.21. Usos de MATLAB ……….………….............…… Pág. 31
B.5.22. Presentación e informe de resultados …………............…… Pág. 31
B.5.23. Productos para crear informes y presentar resultados ........................Pág. 32
B.6. Aplicaciones de las técnicas de captura de datos
B.6.1. Ejemplos de aplicaciones .……………….............……… Pág. 33
B.7. RIAC-LC
B.7.1. Características generales ….……………............……… Pág. 33
B.7.2. Características principales ….………………….............… Pág. 34
B.7.3. Software ….………………….............… Pág. 34
B.7.4. Aplicaciones ….………………….............… Pág. 34
B.7.5. Instalación ….………………….............… Pág. 35
B.7.6. Operación ….……………….............…… Pág. 35
B.7.7. Especificaciones eléctricas ….………….………… Pág. 35
B.7.8. Elementos de seguridad ….………………............…… Pág. 35
B.8. Sensores
B.8.1. Introducción ….……………….............…… Pág. 36
B.8.2. Sensores de temperatura ….……………….............…… Pág. 36
B.8.3. Termopares ….………………............…… Pág. 36
B.8.4. RTD ….……………….............…… Pág. 37
B.8.5. Termistores .…………………...............… Pág. 37
B.8.6. Sensores de temperatura
B.8.6.1. Modelo RTD HS-2K ……………………… Pág. 37
B.8.6.2. Modelo LM35 ……………………............… Pág. 39
B.8.7. Sensor óptico reflexivo infrarrojo …………………….............…. Pág. 39
B.8.8. Sensor de corte …………………….............…. Pág. 40
B.8.9. Sensor de humedad ………………….............……. Pág. 40
B.8.10. Sensor de distancia ………………………. Pág. 41
B.8.11. Sensor de presión ………………….............……. Pág. 41
B.8.12. Sensor de nivel …………………….............…. Pág. 42
B.8.13. Sensor de flujo ………………….............……. Pág. 42
C. Conclusiones ………………………………. Pág. 43
D. Referencias ……….……………………… Pág. 44
A. INTRODUCCION
A.1. Breve descripción
Es la utilización de una computadora personal (PC) en tareas asociadas a la lectura de variables físicas provenientes de una extensa variedad de procesos.
Fig. 1
Una PC es un procesador de señales digitales, las cuales consisten en niveles de voltaje discretos (0 ó 1). Por otra parte, la gran mayoría de las señales son analógicas, es decir, pueden tomar cualquier valor dentro de un rango dado.
La Adquisición de Datos, consiste en tomar un conjunto de variables mensurables en forma física y convertirlas en tensiones eléctricas, de tal manera que se puedan utilizar en la PC. Se requiere una etapa de acondicionamiento que adecua la señal a niveles compatibles con el elemento que hace la transformación a señal digital. El elemento que hace dicha transformación es la Plaqueta de Adquisición de Datos (PAD). Una vez que las señales eléctricas se transformaron en digitales dentro de la memoria de la PC, se las puede procesar con un programa de aplicación adecuado al uso que el cliente desea, y/o archivarlas en disco duro, graficarlas en pantalla, enviarlas por modem-fax, imprimirlas por impresora, etc.
De la misma manera que se toma una señal eléctrica y se transforma en una digital dentro del ordenador, se puede tomar una señal digital o binaria y convertirla en una eléctrica, en este caso el elemento que hace la transformación es una Plaqueta de Adquisición de Datos (PAD) de salida o plaqueta de control. La señal dentro de la memoria de la PC la genera un programa adecuado a las aplicaciones que quiere el usuario y luego de procesada es recibida por mecanismos que ejecutan movimientos mecánicos, a través de servomecanismos, que también son del tipo transductores.
Flexibilidad de procesamiento, posibilidad de realizar las tareas en tiempo real o en análisis posteriores, gran capacidad de almacenamiento, rápido acceso a la información y toma de decisión, posibilidad de emular una gran cantidad de dispositivos de medición y activar varios instrumentos al mismo tiempo, facilidad de automatización, etc.
A.4. Consideraciones Generales
En la mayoría de los procesos de elaboración la rentabilidad del negocio está íntimamente ligada al costo de la materia prima que se utiliza.
Lo mismo sucede con la calidad. Si se utiliza materia prima de alto grado de pureza y buena calidad y, aplicando los mismos procesos de elaboración, las probabilidades de obtener un buen producto final son mucho mayores que si se utiliza materia prima de dudosa composición o baja calidad.
Por supuesto que los que están familiarizados con el ambiente industrial, inmediatamente ya habrán advertido la obviedad de los dos primeros párrafos. Cualquiera sabe que el costo y calidad de la materia prima son factores importantes en el costo y la calidad del producto final.
Pero la intención de este trabajo es llevar estas premisas al ambiente de la industria informática, donde en una factoría, llamada computador, se elabora un producto final llamado información, utilizando una materia prima llamada datos. Y con este glosario se puede definir que en los procesos informáticos se obtiene una buena información, a un costo rentable si se utilizan datos fidedignos ingresados a un costo razonablemente bajo.
Y ese es el objetivo de las técnicas de captura de datos: hacer llegar a las bases de datos la información de los eventos, en forma económica y con la menor cantidad posible de errores. Para ello busca los medios de capturar esos datos en el momento y lugar que se producen, eliminando la intermediación entre el evento y la base de datos.
El proyecto propone la utilización de una tarjeta de adquisición de datos y sus respectivos módulos de potencia como la parte del hardware de control, y el uso de una computadora personal para realizar el procesamiento de los datos recibidos y generar las salidas correspondientes para el control del sistema. Lo más destacable del proyecto es que es de propósito general, esto es, que es aplicable a casi todo sistema susceptible de ser controlado, solo basta tener algo de experiencia en el funcionamiento del sistema para que, mediante lenguaje natural se generen las reglas que determinaran el funcionamiento del sistema.
La industria informática se ha destacado siempre por su constante y vertiginosa evolución. Pero la difusión de su desarrollo no ha sido igual en todos los campos. Y la disparidad a la que se hace referencia es en la difusión, y no en el desarrollo.
Y en lo que se refiere a la captura de datos, la disparidad es realmente notable. A tal punto es así, que el poco conocimiento que tienen los usuarios respecto a las posibilidades de los elementos que disponen o podrían disponer se traduce en un desperdicio de recursos y en un aumento de los costos de los sistemas y una degradación en la calidad de la información.
Si aún existen dudas al respecto, sólo basta preguntar a algún conocido si sabe qué puede hacerse con un scanner conectado al computador personal. La mayoría contestará que se usa para capturar imágenes, fotos, etc., y ni siquiera saben que, con un programa de OCR ( Optical Character Reconigtion ), puede utilizarse fácilmente para 'leer' un artículo y que el resultado de esa lectura puede ser procesado con un editor de textos.
El error o desconocimiento mencionado en el párrafo anterior, se suma a una serie de conceptos equivocados que generalmente tienen los no expertos en informática (y también muchos expertos), como creer que un código de barra sólo sirve para identificar un producto, o que para cada lector óptico de código de barras es necesario instalar una PC, o que para imprimir una etiqueta con código de barras es necesario un soft especial.
Pero, como se dijo anteriormente, la industria de la informática avanzó en muchos campos, y la captura de datos no fue excluida de estos avances . Es así como existen scanners capaces de reconocer y procesar cerca de 50 hojas a doble faz (100 imágenes) por minuto. Que también existen lectores de bandas magnéticas , lectores de código de barras , de códigos bidimensionales , de balanzas electrónicas con comunicación con procesadores centrales , colectores de datos (con o sin lector de código de barras incorporados), de terminales "de mano" comunicadas por radiofrecuencia con el equipo central, de contadores de ciclos o pulsos, caudalímetros, termómetros, "tags" (diminutos circuitos electrónicos) de identificación por radio frecuencia, tarjetas "inteligentes", etc.
Y si se mencionó la existencia de algunos conceptos erróneos, dígase también cuáles son los correctos:
- A una PC pueden llegar a conectarse la cantidad que se desee de lectores de código de barra. Y más aún, todos los dispositivos enumerados en el párrafo anterior (con excepción del scanner ), pueden conectarse en las cantidades necesarias a una misma PC, inclusive combinando en esa cantidad los diferentes dispositivos mencionados.
- Los códigos de barra pueden identificar, además de un producto, los números de legajo de un operario, o un código de tarea, o el número de serie del producto y su fecha de vencimiento, el origen del material, un código de proveedor, etc. Extendiendo el concepto, es posible decir que la Biblia puede escribirse en código de barras.
- Las etiquetas de barras pueden imprimirse desde cualquier programa de computación, sin importar el lenguaje de programación utilizado. Sólo se requiere mandar una secuencia de caracteres especiales (cada marca de impresora tiene los propios) que representan los comandos de formato y de procedimientos necesarios.
Pero no debe creerse que utilizar las técnicas de captura de datos significa desechar todos los sistemas de procesamiento actuales y hacerlos nuevamente. Como máximo, habrá que rediseñar la manera de hacer llegar la información al sistema.
Por lo general, un buen sistema de captura de datos es una interface entre la información y su procesamiento, pero una interface independiente del proceso en sí. Una interface que se ocupa de obtener los datos, y grabarlos en archivos "planos", que a su vez son tomados por la aplicación.
B. DESARROLLO
B.1. DESCRIPCION DEL PROYECTO
El proyecto consta de dos partes básicas las cuales son hardware y software.
B.2. ESQUEMA BASICO
Fig. 1
B.3. ELEMENTOS DE ADQUISICION DE DATOS
B.3.1. Convertidores analógicos-digitales: Los convertidores A/D son dispositivos electrónicos que establecen una relación biunívoca entre el valor de la señal en su entrada y la palabra digital obtenida en su salida. La relación se establece en la mayoría de los casos, con la ayuda de una tensión de referencia.
La conversión analógica a digital tiene su fundamento teórico en el teorema de muestreo y en los conceptos de cuantificación y codificación.
Una primera clasificación de los convertidores A/D, es la siguiente:
- Conversores de transformación directa.
- Conversores con transformación (D/A) intermedia, auxiliar.
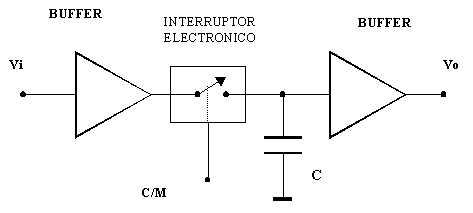
B.3.2. Circuitos de captura y mantenimiento (S/H:Sample and Hold): Los circuitos de captura y mantenimiento se emplean para el muestreo de la señal analógica (durante un intervalo de tiempo) y el posterior mantenimiento de dicho valor, generalmente en un condensador, durante el tiempo que dura la transformación A/D, propiamente dicha. El esquema básico de un circuito de captura y mantenimiento, así como su representación simplificada, se ofrece en la siguiente figura:
Fig. 2
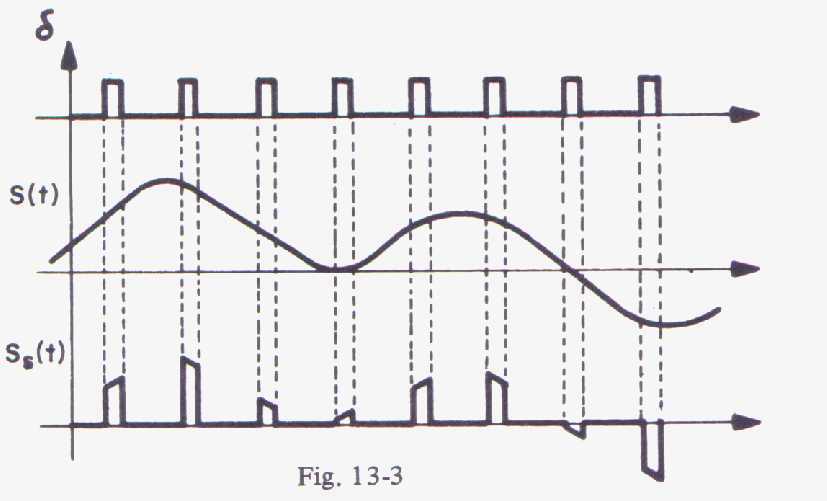
Fig. 3
El funcionamiento del circuito de la figura es el siguiente: El convertidor A/D manda un impulso de anchura tw por la línea C/M, que activa el interruptor electrónico, cargándose el condensador C, durante el tiempo tw. En el caso ideal, la tensión en el condensador sigue la tensión de entrada. Posteriormente el condensador mantiene la tensión adquirida cuando se abre el interruptor.
En la siguiente figura se muestran las formas de las señales de entrada, salida y gobierno del interruptor.
Fig. 4
El gráfico tiene un carácter ideal, puesto que tanto la carga como la descarga del condensador están relacionadas estrechamente con su valor y con el de las resistencias y capacidades parásitas asociadas al circuito.
Se recalca el hecho de que el control de la señal C/M procede del convertidor A/D, que es el único que conoce el momento en que finaliza la conversión de la señal.
B.3.3. Conversor A/D con comparadores: Es el único caso en que los procesos de cuantificación y codificación están claramente separados. El primer paso se lleva a cabo mediante comparadores que discriminan entre un número finito de niveles de tensión. Estos comparadores reciben en sus entradas la señal analógica de entrada junto con una tensión de referencia, distinta para cada uno de ellos. Al estar las tensiones de referencia escalonadas, es posible conocer si la señal de entrada está por encima o por debajo de cada una de ellas, lo cual permitirá conocer el estado que le corresponde como resultado de la cuantificación. A continuación será necesario un codificador que nos entregue la salida digital.
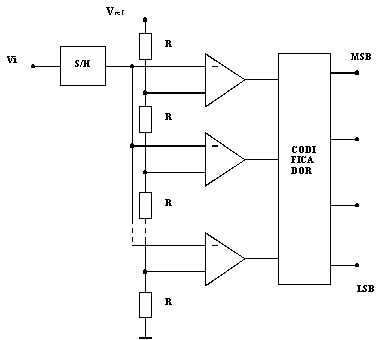
Fig. 5
Este convertidor es de alta velocidad, ya que el proceso de conversión es directo en lugar de secuencial, reduciéndose el tiempo de conversión necesario a la suma de los de propagación en el comparador y el codificador. Sin embargo, su utilidad queda reducida a los casos de baja resolución, dado que para obtener una salida de N bits son necesarios 2N-1 comparadores, lo que lleva a una complejidad y encarecimiento excesivos en cuanto se desee obtener una resolución alta.
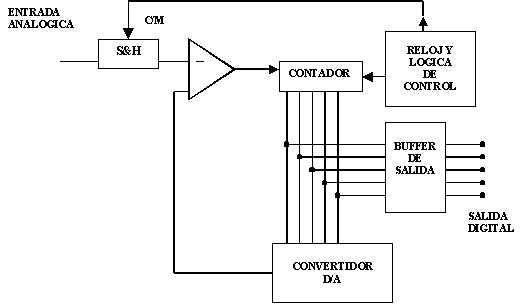
B.3.4. Conversor A/D con contadores: Llamado también convertidor con rampa en escalera. Usa el circuito más sencillo de los conversores A/D y consta básicamente de los elementos reflejados en la figura siguiente:
Fig. 6
B.3.5. Conversor D/A y buffers de salida: Una vez que el circuito de captura y mantenimiento (S/H), ha muestreado la señal analógica, el contador comienza a funcionar contando los impulsos procedentes del reloj. El resultado de este conteo se transforma en una señal analógica mediante un convertidor D/A, proporcional al número de impulsos de reloj recibidos hasta ese instante.
La señal analógica obtenida se introduce al comparador en el que se efectúa una comparación entre la señal de entrada y la señal digital convertida en analógica. En el momento en que esta última alcanza el mismo valor (en realidad algo mayor) que la señal de entrada, el comparador bascula su salida y se produce el paro del contador.
El valor del contador pasa a los buffers y se convierte en la salida digital correspondiente a la señal de entrada.
Este convertidor tiene dos inconvenientes:
- Escasa velocidad.
- Tiempo de conversión variable.
El segundo inconveniente puede comprenderse fácilmente con la ayuda de la siguiente figura, en la que se aprecia que el número de impulsos de reloj (tiempo), precisos para alcanzar el valor Vien el conversor D/A depende del valor de Vi.
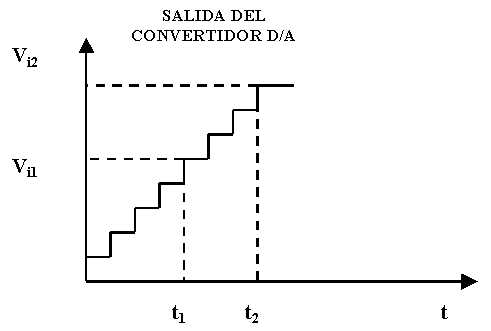
Fig. 7
Dicho tiempo de conversión viene dado por la expresión:
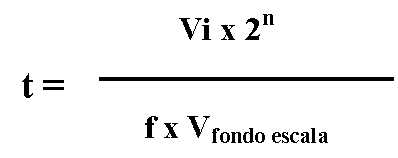
Fig. 8
B.3.6. Conversor A/D con integrador: Este tipo de convertidores son más sencillos que los anteriores ya que no utilizan convertidores D/A. Se emplean en aquellos casos en los que no se requiere una gran velocidad, pero en los que es importante conseguir una buena linealidad. Son muy usados en los voltímetros digitales. Existen dos tipos:
B.3.7. Convertidor A/D de rampa única: Consta, como se refleja en la figura, de un integrador, un comparador, un generador de impulsos y un contador con sus buffers de salida.
En la puesta en marcha tanto el integrador como el contador son puestos a cero por el circuito de control.
B.4. TEOREMA DEL MUESTREO
B.4.1. Enunciado:
Si una señal continua, S(t), tiene una banda de frecuencia tal que fm sea la mayor frecuencia comprendida dentro de dicha banda, dicha señal podrá reconstruirse sin distorsión a partir de muestras de la señal tomadas a una frecuencia fs siendo fs > 2 fm.
En la figura se muestra un esquema simplificado del proceso de muestreo.
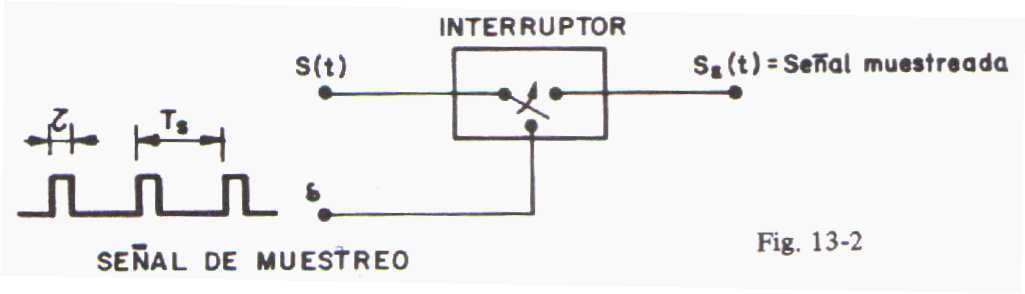
Fig. 9
El interruptor no es del tipo mecánico, puesto que por lo general fs es de bastante valor. Suelen emplearse transistores de efecto campo como interruptores, para cumplir los requerimientos que se le exigen entre los que se encuentran:
Una elevada resistencia de aislamiento cuando los interruptores (transistores) están desconectados. Una baja resistencia si los interruptores están conectados o cerrados. Una elevada velocidad de conmutación entre los dos estados de los interruptores. En la siguiente figura se ofrece las formas de las tres señales principales:
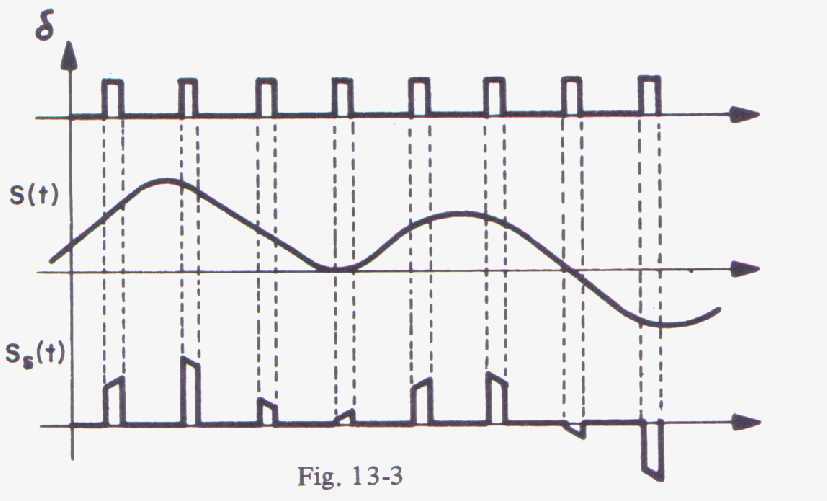
Fig. 10
S(t) señal a muestrear - S(t) señal muestreada
Desde el punto de vista de la cuantificación de la señal muestreada, lo ideal sería que el tiempo en que el interruptor está cerrado, fuese prácticamente cero, ya que de otro modo, la señal muestreada puede variar en dicho tiempo y hacer imprecisa su cuantificación.
Debe tenerse en cuenta que para la reconstrucción de la señal original, a partir de la muestreada, se emplea un filtro de paso bajo, el cual deberá tener una función de transferencia como se indica en la figura siguiente:
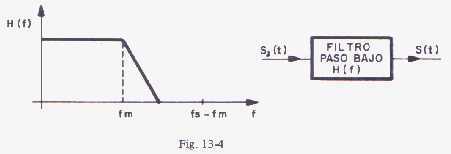
Fig. 11
Obsérvese que la respuesta del filtro, debe ser plana hasta una frecuencia, como mínimo, igual a fm, para caer posteriormente de forma brusca a cero, antes de que la frecuencia alcance el valor de fs-fm.
Mediante la aplicación del Teorema del Muestreo, se pueden transmitir varias señales, por un mismo canal de comunicación. Para ello se muestrea sucesivamente varias señales S1, S2, S3,.... y las señales muestreadas se mandan por el canal de comunicación. A este sistema se le denomina "multiplexado en el tiempo"
Al otro extremo del canal habrá que separar las distintas señales muestreadas para hacerlas pasar después por el filtro paso bajo que las reconstruya.
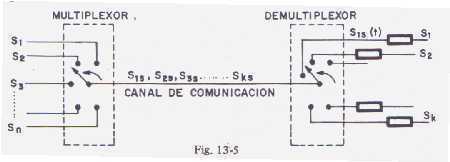
Fig. 12
En la figura anterior el multiplexor y el desmultiplexor se han representado mediante conmutadores rotativos sincronizados , los cuales, evidentemente no son adecuados, dada la gran frecuencia de giro fs, necesaria en este sistema. Para ello se emplean multiplexores y desmultiplexores electrónicos.
En este sistema de transmisión de señales es imprescindible, el perfecto sincronismo entre los dos extremos del canal.
B.4.2. Multiplexor:
Un multiplexor es un dispositivo lógico que recibe información por sus dos o más entradas (de uno o más bits de ancho) y mediante una señal de control decidimos cual de las entradas aparece reflejada en la salida; esto es, un convertidor de paralelo a serie. Si tienen una señal de "enable" esta hace que el multiplexor esté habilitado o no
Los multiplexores disponibles tienen todos señal de enable menos el primero. Las arquitecturas están realizadas solo para algunas entidades
El multiplexor se encarga de transmitir la información saliente de todo el proceso en el orden especificado por la recomendación. Aquí se incorpora toda la información necesaria para el buen funcionamiento del decodificador, en particular:
Figura 13: Un Macrobloque, formado por cuatro bloques de luminancia y sus diferencias de color correspondientes
|
|
|
|
Fig. 13
Figura 14: Disposición de los Macrobloques dentro de un Grupo de Bloques
|
|
Fig. 14
Un Macrobloque (ver figura 1.6) se compone de cuatro bloques de luminancia adyacentes y de los dos bloques de diferencia de color1.31 que les corresponden espacialmente. 33 macrobloques componen un Grupo de Bloques, de la forma que indica la figura 1.7. Una imagen se compone de 3 ó 12 Grupos de Bloques, según sea Cif o QCif. Podemos ver en la figura 1.8 la disposición de los Grupos de Bloques en la imagen.
Figura 15: Disposición de los Grupos de Bloques dentro de una Imagen
|
|
Fig. 15
Los números que aparecen en los elementos correspondientes de cada figura son indicativos del orden en que se transmitirán. Es decir, se comienza transmitiendo el bloque 1 del Macrobloque 1 del Grupo de Bloques 1, seguidamente el bloque 2 del Macrobloque 1 del Grupo de Bloques 1, así hasta acabar con el primer Macrobloque; continuamos con el Macrobloque 2 del mismo Grupo, hasta acabar con él, y así sucesivamente. En el caso de una imagen QCIF, la numeración es 1,3,5 en lugar de 1,2,3 probablemente para hacer coincidir una imagen QCIF en el cuadrante superior izquierdo de una imagen CIF.
|
Multiplexor de un bit y dos canales sin "enable" |
Este primer ejemplo es el más sencillo de todos ya que no se puede concebir un multiplexor con menos operatividad. Usaremos el tipo bit, que viene predefinido por VHDL, y sirve para indicar que la señal o variable asociada es de un sólo bit. La nomenclatura usada para designar a los puertos se mantendrá hasta el final de la práctica, no así como el nombre de la entidad, que lo cambiaremos.
|
Entity multiplexor is port(a,b : in bit; control : in bit; c: out bit);end multiplexor; |
En este caso, las entradas son a y b (por eso son del modo in), la señal de control es control (también del modo in), y la salida es c (del modo out). Todas son de un bit de ancho. |
Fig. 16
|
Qué hacer para que tenga señal de "enable" |
|
Para que nuestro diseño tenga una señal de enable, y a efectos de la entidad, solamente debemos incluirla sin más. Más adelante, en la arquitectura será donde deberemos manejar esta señal para que realice lo que nosotros queramos.
|
Entity multiplexor is ort(a,binbit;control in bit;enable inbit, out bit);end multiplexor; |
En este caso, las entradas son a y b, la señal de control es control, la señal de enable es enable, y la salida es c. Todas vuelven a ser de un bit de ancho. |
Fig. 17
|
Qué hacer para que cada canal sea de mas bits |
|
Si queremos que cada entrada (y la salida, por supuesto), tengan más anchura, es decir, más bits, no nos sirve el tipo bit, ya que su anchura es de un bit. Para ello deberemos usar vectores de bits, que al igual que bit está predefinida en VHDL. En este ejemplo usaremos entradas de 4 bits, que para definirlos hay que escribir el número de mayor peso seguido de la palabra downto y del número de menor peso.
|
Entity multiplexor is port(a,b:in bit_vector(3 downto 0);control:in bit;enable :in bit;c: out bit_vector(3 downto 0));end multiplexor; |
En este caso, las entradas son a y b, la señal de control es control, la señal de habilitación es enable, y la salida es c. Ahora, las entradas a y b son de 4 bits de ancho, pero como sólo son dos, control debe seguir siendo de un solo bit. La salida debe aumentar también para adaptarse a las entradas. |
Fig. 18
|
Qué hacer para que tenga más canales |
|
|
|
|
Al igual que cuando queríamos que tuviese señal de enable, si ahora queremos más canales, a efectos de la entidad, sólo debemos añadirlos.
|
Entity multiplexor
is port(a,b,c: in
bit_vector(3 downto 0);control:in bit_vector(1 downto
0); |
En este caso, las entradas son a, b, y c, la señal de control es control, la señal de habilitación es enable, y la salida es d. Las entradas y la salida siguen siendo de 4 bits de ancho, y al haber más de dos, control debe aumentar su anchura a dos bits. |
|
control |
enable |
d |
|
XX |
H |
HHHH |
|
LL |
L |
a |
|
LH |
L |
b |
|
HL |
L |
c |
|
HH |
L |
HHHH |
|
|
|
|
Fig. 19
|
Estilo algorítmico o de comportamiento usando la entidad 4 |
|
El estilo algorítmico es una forma de programación en la cual se usan los elementos propios de un lenguaje de programación, es decir, ciclos for, while, case,... Para un multiplexor, parece hecha a la medida la sentencia case, y para comprobar si la entrada enable está habilitada un ciclo for. Una forma de implementar el multiplexor correspondiente a la entidad 4 sería la siguiente:
|
1 |
entity multi is
port( |
|
Debemos ver lo siguiente en este ejercicio:
|
|
|
|
|
|
Estilo flujo de datos usando la entidad 2 |
|
El estilo de flujo de datos nos muestra la funcionalidad de un dispositivo mediante ecuaciones ejecutadas concurrentemente, es decir, todas a la vez. Mediante las sentencias and, xor, not, and,.. transformamos las entradas en las salidas. Para el ejemplo del multiplexor de dos canales de un bit con "enable" el esquema de puertas lógicas es el siguiente:
Fig. 20
|
1 |
entity multi is port( |
|
Recordemos que unas sentencias son concurrentes si se ejecutan todas a la vez. De este código debemos destacar estas dos cuestiones:
|
d <= enable and ( (b and (not(control)) or (a and control) ); |
Este tipo de estilo es solo recomendable usarlo en "estado puro" solo para diseños tan sencillos , siendo de verdadera utilidad al usarlo como complemento del estilo algorítmico y en ocasiones del estructural. A partir de ahora la única forma en que la veamos será esta: como complemento.
|
Estilo estructural usando la entidad 2 |
|
El estilo estructural es fácilmente reconocible porque la operatividad del programa no se puede leer del código ya que está formado íntegramente por componentes y las señales que les unen a otros. Es decir, está formado por bloques o cajas negras a los cuales metemos información y sacamos las salidas, las cuales podrán o no ir a otros bloques. Para esto debemos conocer la operatividad de estos bloques, los cuales suelen estar en librerías. Para usar las puertas que están en el paquete gatespkg debemos primero invocar a la librería ieee (léase "i e cubo") como está expuesto en la primera línea de la entidad que debemos usar. Para usar el paquete (o sub-librería) gatespkg la llamaremos de la forma en que está en la segunda línea. Estas librerías vienen incluidas en la versión 3.5 del programa WARP, de Cypress Semiconductor.
Fig. 21
|
1 |
library ieee; |
Llamamos a la librería IEEE |
En este ejemplo vemos que debemos hacer para usar las librerías que vienen predefinidas con el lenguaje VHDL y más concretamente con Warp 3.5 de Cypress Semiconductor. Para trabajar con librerías debemos tener en cuenta estos puntos:
Si alguien cambiase el contenido de la librería e hiciese que el bloque and2 dejase de ser una puerta and de dos entradas, nuestro diseño no sería correcto, ya que no haría lo que nosotros pretendemos en un principio. Por esto, debemos estar seguros de que función realiza una parte de una librería antes de usarla.
Al igual que el estilo de flujo de datos, este estilo es poco usado en estado puro, usándose solamente para unir diseños complejos creados anteriormente.
B.5. SOFTWARE DE ADQUISICION Y TRATAMIENTO DE DATOS MATLAB
B.5.1. Descripción
Es un ambiente de computación técnica integrado que combina computación numérica, gráficas avanzadas y un lenguaje de programación de alto nivel. Cualquiera que sea el objetivo - un algoritmo, análisis, gráficos, reportes o simulación. El lenguaje flexible e interactivo de Matlab permite a ingenieros y científicos expresar sus ideas técnicas fácilmente. El poderoso y extenso método de computación numérica y sus gráficos permiten probar y explorar ideas alternativas fácilmente, mientras que el ambiente de desarrollo integrado hace fácil producir resultados prácticos rápidamente.
B.5.2. Componentes del Software

Fig. 21
B.5.3. Integración de adquisición y análisis
Fig. 22
Muchos ingenieros se encuentran con que el proceso de test y medición no finaliza una vez recogidos los datos o realizado el test. Necesitan transformar esos datos en resultados concretos mediante un cuidadoso análisis y obtención de un modelo. En el pasado esto requería que el proceso de test y medición se realizara en múltiples entornos. A menudo, los datos recogidos se guardan en un fichero y después se transfieren manualmente a otro paquete de software, tal como MATLAB®, para el análisis.
MATLAB proporciona ahora un medio sencillo de ir directamente desde la recolección de datos a la derivación de resultados informativos. MATLAB ayuda a ingenieros y científicos a analizar, visualizar y modelar información compleja, y proporciona herramientas para comunicar con su equipo de test y controlarlo.
B.5.4. La solución MATLAB para test y medición
MATLAB soporta todo el proceso de adquisición y análisis de datos, incluida la conexión con los instrumentos y dispositivos de adquisición de datos y la visualización, y la producción de salidas en calidad de presentación. Con las herramientas MATLAB para aplicaciones de test y medición, puede:
B.5.5. Herramientas para test y medición
MATLAB proporciona funcionalidad puntera de análisis y visualización. Usted puede usar nuevas herramientas MATLAB 6 para comunicar con dispositivos a través de su puerto en serie (RS-232, RS-422, RS-485). A todas las herramientas de test y medición se accede con facilidad a través de la interfaz visual MATLAB y el lenguaje MATLAB.
B.5.6. Data Acquisition Toolbox
El Data Acquisition Toolbox le permite conducir directamente a MATLAB los datos medidos en directo. Puede controlar y comunicarse con hardware de adquisición de datos de fabricantes tales como National Instruments, Agilent Technologies y ComputerBoards, y crear interfaces personalizadas con el hardware usando el kit adaptador.
B.5.7. Instrument Control Toolbox
Usando el Instrument Control Toolbox, puede comunicarse con instrumentos a través de los protocolos de comunicación GPIB y VXI. El toolbox proporciona también interfaces gráficas de usuario (GUIs) intuitivas para crear objetos de instrumentos y comunicar con instrumentos.
B.5.8. Herramientas adicionales:
MATLAB tiene más de 40 toolboxes adicionales para análisis avanzado, simulación y modelado y desarrollo de aplicaciones que complementan las aplicaciones de test y medición. Incluyen:
B.5.9. Interfaz con dispositivos externos
Las herramientas de verificación y medición MATLAB® combinan adquisición de datos y capacidad de conexión de los instrumentos con las potentes fusiones de análisis y visualización de MATLAB - todo en un único entorno. MathWorks proporciona productos que le permiten establecer una interfaz con diversos protocolos de comunicación y dispositivos de adquisición de datos de estándar industrial.
B.5.10. .Usos de MATLAB y los Data Acquisition e Instrument Control Toolboxes:
Estas herramientas le permiten moverse de manera continua entre recogida de datos y análisis, con lo que se puede generar resultados reales con mayor velocidad. Son ideales para una amplia variedad de aplicaciones que impliquen test de componentes a nivel de sistema.
"El Data Acquisition toolbox está completamente integrado con MATLAB, por lo que la recogida y el procesado de datos se hacen dentro de un único entorno, usando el lenguaje MATLAB. Este enfoque favorece a las aplicaciones que requieren un procesado posterior y una visualización personalizada importantes".
Fig. 23
MATLAB proporciona herramientas, tales como Data Acquisition y Instrument Control Toolboxes para conexión con dispositivos de hardware externo. Aquí se creó un osciloscopio usando MATLAB y el Data Acquisition Toolbox para ver y analizar datos cuando se introducen en directo a MATLAB. Haga click sobre la imagen para verla aumentada
B.5.11. Productos para interfaz con dispositivos externos
MATLAB proporciona acceso directo a los datos desde conexiones de un puerto en serie (RS-232, RS-422, RS-485) y ficheros de datos con formato MATLAB (ficheros MAT). MATLAB incluye también soporte incorporado para formatos habituales de ficheros, incluidos formatos de datos científicos, formatos de ficheros de imagen y formatos estándar industriales como Excel. Funciones adicionales realizan E/S binarias de bajo nivel y ASCII a partir de ficheros .M, C, y programas Fortran
B.5.12. Análisis y visualización de datos
MATLAB® soporta todo el proceso de exploración y análisis de datos. Combina centenares de funciones analíticas avanzadas con gráficos prácticos científicos y de ingeniería. Los datos recogidos usando las herramientas de comprobación y medición de MATLAB pueden llevarse directamente al espacio de trabajo MATLAB para un análisis de datos rápido y preciso, y para una manipulación y procesado previo y posterior de los datos. Utilizando estas herramientas integradas, de manera rápida u sencilla puede:
Fig. 24
|
El Signal Processing Toolbox proporciona funciones para el análisis de señales y sistemas lineales y la obtención de modelos de datos de series temporales. Aquí se muestra el Signal Browser usado para analizar y mostrar los datos recogidos. Haga click sobre la imagen para verla aumentada. |
B.5.13. Matemáticas y análisis punteros
MATLAB hace que resulte sencillo analizar los datos que ha recogido. Con MATLAB y sus toolboxes acompañantes puede experimentar de manera interactiva, visualizar y analizar sus datos usando cualquiera de las funciones analíticas incorporadas, incluido:
B.5.14. Gráficos descriptivos para explorar y presentar sus datos
Gráficos especializados le permiten visualizar de manera instantánea los datos medidos. Los gráficos 2-D y 3-D están integrados con las fusiones analíticas de MATLAB de modo que usted puede representar gráficamente cualquier serie de datos brutos, ecuación o resultado de una función. También puede usar los gráficos MATLAB para controlar los datos en directo a medida que llegan al espacio de trabajo. Las herramientas de edición de plot de MATLAB le facilitan la personalización de sus gráficos para presentarlos a sus colegas o crear representaciones personalizadas para controlar su colección de datos.
Fig. 24
|
El Data Acquisition Toolbox le permite leer datos directamente en MATLAB a partir de circuitos de hardware seleccionados. En este caso, una señal de entrada, capturada por una tarjeta de sonido, se muestra en forma de una imagen PSD y un FFT instantáneo. Se utilizan aquí las prestaciones de visualización y procesado de señales de MATLAB. Haga click sobre la imagen para verla aumentada. |
B.5.15. Toolboxes específicos de la aplicación
Los toolboxes MATLAB se construyen sobre los algoritmos facilitados en MATLAB para proporcionar funciones específicas de la aplicación realizadas por expertos internacionales. Los toolboxes MATLAB le permiten aprender, aplicar y comparar las mejores técnicas, permitiéndole evaluar diferentes enfoques.
Puede incorporar estos y otros toolboxes punteros en su aplicación de prueba.
B.5.16. Procesado de señales
El Signal Processing Toolbox le permite analizar señales y sistemas lineales, realizar análisis espectrales y modelos de datos de series temporales y diseñar y aplicar filtros.
Estadísticas: Puede utilizar el Statistics Toolbox para analizar series de datos complejos, obtener modelos de sistemas para predecir comportamientos futuros, aplicar métodos estadísticos tales como distribuciones de probabilidad, análisis de multivariante, regresiones y otros.
B.5.17. Wavelets
El Wavelet Toolbox le permite realizar análisis de señales, compresión, eliminación de ruido y examinar fenómenos locales, de escala múltiple y no estacionarios.
B.5.18. Identificación de sistemas
Usando el System Identification Toolbox puede construir modelos precisos y simplificados de sistemas complejos de datos de series temporales con ruido, y crear modelos matemáticos de sistemas dinámicos basados en datos de entrada/salida.
B.5.19. Redes neuronales
Con el Neural Network Toolbox puede explorar, clasificar e identificar patrones en grandes series de datos y simular redes neurales.
B.5.20. Desarrollo de algoritmos y modelos
MATLAB® ofrece un entorno intuitivo para desarrollar y validar simulaciones y algoritmos personalizados. Utilizando los algoritmos matemáticos incorporados, puede desarrollar un modelo de su sistema o dispositivo sometido a test. Con la capacidad de visualización de MATLAB, puede crear un modelo gráfico de sus datos para identificar con facilidad sutilezas y anomalías. El potente lenguaje técnico de MATLAB es conciso y descriptivo, permitiéndole crear un modelo de sistemas complejos con pequeñas secciones de códigos de seguimiento fácil.
Fig. 25
|
La visualización MATLAB puede ayudar a identificar con rapidez los fenómenos sutiles. Este plot 3-D de una onda de choque propagándose en un fluido representa la presión como altura, el número Mach como color y las líneas de corriente en negro. |
Los datos recogidos con las herramientas MATLAB de
test y medición pueden usarse para desarrollar y afinar su modelo. Por
ejemplo, los datos medidos pueden utilizarse para desarrollar un modelo matemático
o gráfico de su dispositivo o sistema sometido a test. Entonces usted
puede simular su diseño en MATLAB y aplicar las fusiones analíticas
de MATLAB para afinarlo. Estos resultados pueden aplicarse entonces directamente
a su sistema o componente real.
B.5.21. Usos de MATLAB:
MATLAB elimina la necesidad de usar múltiples entornos de software para interfaces de hardware y para análisis y obtención de modelos. El resultado es que usted puede derivar los resultados con mayor velocidad, facilidad y reducción de costes que aplicando los métodos de test tradicionales. MATLAB y los productos asociados ofrecen un abanico de herramientas para simulación y obtención de modelos que incluyen:
Centenares de funciones para cálculo matemático, análisis de datos, resolución de ecuaciones y visualización, todo ello disponible como parte del núcleo de MATLAB
Algoritmos punteros en toolboxes adicionales de MATLAB que amplían MATLAB a áreas tales como procesado de señales, estadística, redes neurales y otras.
B.5.22. Presentación e informe de resultados
Una vez realizado el test y finalizados los resultados, MATLAB® le facilita compartir los resultados con sus colegas. Con MATLAB y los toolboxes complementarios usted puede:

Fig. 26
El Database Toolbox Visual Query Builder permite a los usuarios no acostumbrados a SQL interactuar con cualquier base de datos conforme a IDBC/JDBC desde dentro de MATLAB sin usar SQL. Haga click sobre la imagen para verla aumentada. (38 KB)
B.5.23. Productos para crear informes y presentar resultados
B.6. APLICACIONES DE LAS TÉCNICAS DE CAPTURA DE FATOS:
B.6.1.Ejemplos de aplicaciones
Si nos ajustamos estrictamente al concepto de "Captura de datos", debemos decir que cualquier aplicación que implementemos, deberá tener una forma de ingresar o capturar los datos que requiere.
Pero si hacemos referencia a la utilización de los elementos que mencionamos bajo el título "Técnicas no tradicionales", y especialmente a los lectores de códigos de barra, podemos enumerar como campos de utilización, y a modo de ejemplos, a las siguientes aplicaciones:
En forma general, podríamos decir que es difícil encontrar una actividad de la informática que no tenga prevista una solución apropiada para la captura de los datos.
Los módulos RIAC-LC permiten adquirir datos analógicos y digitales, así como realizar acciones de control. Se conectan mediante una línea a un computador que cuente con un port de comunicaciones. Un microcontrolador de 16 bits gobierna la totalidad del módulo: comunicaciones, adquisición y control.
Cada RIAC-LC cuenta con un grupo de 20 terminales distribuidos en tres ports, que operan, según los modelos, como entradas analógicas, o bien como entradas y/o salidas digitales (ver tabla). Todos los terminales se disponen en borneras para facilitar la instalación y el mantenimiento. Pequeñas dimensiones 10 x 11 cm.
Los módulos operan bajo la norma RS232 ó RS485. Con RS485 es posible conectar múltiples RIAC-LC sobre la misma línea, que puede extenderse a gran distancia. La velocidad de trabajo es seleccionable entre 300 y 115200 baudios. Los módulos operan gobernados desde el computador central, control ejercido a través de la línea de comunicaciones, a tal efecto dispone de un protocolo ASCII, sencillo y eficiente. Este consiste de comandos enviados por el computador y respuestas de las unidades RIAC-LC. Pueden utilizarse cualquiera de los lenguajes corrientes, VISUAL BASIC, VISUAL C, Qbasic, etc. Con cada módulo se provee el programa RIACTEST, destinado a la capacitación, prueba e instalación de las RIACs.
Cada unidad ofrece además protección para evitar la piratería del software del usuario (reemplazan los protectores que operan sobre el conector de la impresora).
Fig. 27
B.7.2. Características principales
 Incluye
protector para el software del usuario
Incluye
protector para el software del usuario
Fig. 28
B.7.3. Software
Operación simple mediante el uso de protocolo ASCII.
Fácil de programar en VISUAL BASIC ó VISUAL C, etc.
Ejemplos en WINDOWS y DOS.
B.7.4. Aplicaciones
|
Modelo |
Entradas analógicas |
Entradas digitales |
Salidas digitales |
Terminales Bidireccionales |
|
RIAC-LCA |
8 |
8 |
|
4 |
|
RIAC-LCB |
|
8 |
8 |
4 |
|
RIAC-LCC |
|
16 |
|
4 |
|
RIAC-LCD |
8 |
|
8 |
4 |
|
RIAC-LCE |
|
|
16 |
4 |
B.7.5. Instalación
La instalación es simple, varios módulos RIACs pueden conectarse a una línea bifilar (norma RS485), ó a una línea de tres hilos en caso de utilizar RS232. Los sensores, llaves, relevadores, etc, se conectan a la bornera. La alimentación, puede ser compartida por varias RIACs y se ingresa también por la bornera.
B.7.6. Operación
Mediante comandos el computador consulta el estado de cualquier entrada del módulo remoto, este le devuelve la respuesta. Puede también enviar un comando que acciona un relevador o carga conectada sobre la salida del módulo RIAC. El procedimiento es simple, como puede verse en los ejemplos redactados en BASIC.
|
PRINT #1, "#3 RI 1" |
'*RIAC #3, port 1 (Read Input) |
|
PRINT #1, "#7 WO 2 4" |
'*#7 port 2, relay 4 (Write Out) |
|
PRINT #1, "#5 AI 3" |
'*#5 lee canal analógico 3 |
Cuenta con comandos públicos destinados a todos los módulos RIACs.
B.7.7. Especificaciones eléctricas
B.7.8. Elementos de seguridad
B.8. SENSORES
B.8.1. Introducción
Los sensores son para la PC como nuestros sentidos para el cuerpo, vista , oído, tacto, olfato lo utilizamos como sensores para nuestra vida cotidiana.
Para poder realizar una adquisición de datos de campo necesitamos sensores estos son tan diversos como los principios físicos en los que se basan.
En la actualidad para medir cualquier variable física tenemos diversos tipos de sensores.
B.8.2 Sensores de temperatura
Los sensores de temperatura más sencillos son los que actúan sobre un interruptor miniatura y en general, éstos son de dos tipos: Sistemas de Dilatación de un fluido y Bimetálicos. Los primeros actúan al dilatarse el líquido o el gas contenido dentro de un capilar y, los segundos actúan directamente el interruptor mediante el efecto de diferencia de dilataciones de tiras de dos metales diferentes. En general, se usan para interrumpir hasta corrientes de 30 Amperes en 120 volts.
Otros sensores de temperatura son los termopares, detectores de temperatura por resistencia (RTD) y, los termistores.
B.8.3. Termopares
Los termopares están hechos de dos alambres de metales diferentes unidos precisamente en el punto de medición, también conocido como "unión caliente". Un pequeño voltaje llamado Seebeck, en honor a su descubridor, aparece entre los dos alambres en función de la temperatura de esa unión y, ese voltaje es la señal que actúa sobre el controlador de temperatura.
Los termopares son en general de los sensores los más baratos y los más robustos, aunque para evitar errores de materiales disímiles, los cables de extensión deben ser del mismo material del termopar.
Existen termopares apropiados para diferentes rangos de temperatura y diferentes ambientes industriales. Ejemplos:
|
TIPO |
ALEACIONES |
RANGO (°C) |
|
J |
Hierro/Constantan |
0 a 760 |
|
K |
Cromel / Alumel |
0 a 1260 |
|
E |
Cromel / Constantan |
-184 a 871 |
|
T |
Cobre / Constantan |
-184 a 371 |
|
R |
Platino 13% / Rodio Platino |
0 a 1482 |
B.8.4. RTD
Los RTDs son principalmente hechos de alambre de platino enrrollado en una base cerámica cubiertos de vidrio o de material cerámico. Además pueden encontrarse como película en un sustrato.
Con la temperatura el platino cambia de resistencia y, con un circuito similar al conocido Puente de Wheatston este cambio puede ser utilizado en un indicador o controlador de temperatura.
Este tipo de sensor se fabrica también de Níquel en lugar de Platino pero son más usuales los de este último material, en sus variantes de norma alemana o japonesa.
Es sencilla la conexión de estos elementos y su prueba, ya que a 0° C, la resistencia del RTD de Platino es de 100 ohms y varía a razón de 0.385 ohms por grado Celsius.
B.8.5. Termistores
Los termistores están fabricados de un material semiconductor que cambia su resistencia eléctrica abruptamente en un pequeño rango de temperatura, por lo que son empleados en sistemas de adquisición de datos y en equipos delicados. Ejemplo: Control de Temperatura de Osciladores Electrónicos.
Su desventaja es que requieren de potencia para funcionar por lo que se autocalientan, y eso debe ser compensado en el circuito de medición.
B.8.6. Sensores de temperatura
B.8.6.1 Modelo RTD HS-2K
El sensor permite una medición de temperatura a través de un sistema sellado en diferentes aplicaciones, ya sea cámaras hiperbáricas, aplicaciones industriales, etc. para una temperatura ambiente entre –20 y 200°C.
El sensor de temperatura que basa su funcionamiento en la variación de resistencia a cambios de temperatura del medio. El elemento consiste en un arrollamiento muy fino de Platino bobinado entre capas de material aislante y protegido por un revestimiento cerámico.
El material que forma el conductor(platino), posee un coeficiente de temperatura de resistencia a, el cual determina la variación de la resistencia del conductor por cada grado que cambia su temperatura según la siguiente ecuación:
Rt = Ro(1 + a t)
Donde:
Ro= resistencia en W(ohms) a 0°C
Rt = resistencia en W(ohms) a t°C
Fig. 29
t = temperatura actual
a= coeficiente de temperatura de la resistencia cuyo valor entre 0°C y 100°C es de 0.003850 Wx(1/W)x(1/°C) en la escala Práctica de Temperaturas Internacionales(IPTS-68).
El platino es el elemento más indicado para la fabricación de sensores de temperatura, posee:
Características técnicas
Tipo de sensor resistencia de platino 100W a 0ºC
Rango de t° Operativo 0 – 200°C
Exactitud 0.5ºC
Conexión 3 cables(RTD, RTD, compensación)
Herméticamente sellado
Resistente a ambientes hostiles
Hasta 200°C de Temp. ambiente
Cuerpo y conector de acero inoxidable
Conector interno de teflón
Aplicaciones
El sensor de temperatura con conector HS-2K, está diseñado para industrias de alimentos, minería, plásticos y otras, para atmósferas con humedad relativa de 100% o en forma sumergida. Sus características de construcción, permiten la aplicación directa de vapor o limpieza con elementos químicos tales como soda, ácido y otros
B.8.6.2 Sensor de temperatura LM35
Las series LM35 son los sensores de temperatura del circuito integrado de precisión, y el voltaje de salida es linealmente proporcional a la temperatura (Cº). El LM35 no requiere ninguna calibración o ajuste externo; proporciona exactitud de ±1/4°C en la temperatura ambiente y ±3/4°C sobre –55º o en +150°C.
Características técnicas:
Calibrado directamente en Celsius (centígrado)
De factor de posicionamiento lineal +10,0 mV/°C
Exactitud 0.5°C
Rango de -55° hasta +150°C
Conveniente para aplicaciones remotas
Opera entre 4 a 30 voltios
Baja salida de impedancia, 0,1 W para la carga de 1 mA
Fig. 30
B.8.7 Sensor óptico reflexivo infrarrojo
Descripción El CNY70 tiene una construcción compacta en donde la fuente de luz que emite y el detector son fijados en la misma dirección para detectar la presencia de un objeto usando la viga IR reflexiva del objeto. La longitud de onda de funcionamiento es 950 nm. El detector consiste en un fototransistor.
Distancia que censa 0,3 mm
Fig. 31
B.8.8 Sensor de corte
El interruptor óptico modelo H21A es un diodo electroluminoso juntado a un fototransistor del silicio en una cubierta plástica.
Si por la abertura de 0,35" en la cubierta entra un material opaco se interrumpe la señal, cambiando la salida de un estado "ON" a un estado de "OFF"
Fig. 32
B.8.9 Sensor de humedad
Modelo Philips 2322 691 90001
Este sensor atmosférico capacitivo de la humedad consiste en una hoja no conductor, que se cubre en ambos lados con una capa de oro. La constante dieléctrica de la hoja cambia en función de la humedad relativa de la atmósfera ambiente y, por consiguiente, el valor de la capacitancia del sensor es una medida para la humedad relativa.
En equipo no es afectado por la condensación fortuita del agua en la hoja del sensor.
No debe ser expuesta a los vapores de la acetona.
Características técnicas
Rango de Humedad (RH) 10 to 90 %
Capacidad +25 °C; 43% RH; 100 kHz 122 ±15% pF
Sensbilidad entre 12 and 75% RH 0.4 ±0.05 pF/%RH
Frequencia 1 to 1000 kHz
Máximo voltaje en AC o CC 15 V
Rango de humedad de almacenaje (RH) 0 to 100 %
Rango de temepratura ambiente:
B.8.10 Sensor de Distancia
Los sensores de distancia utilizan un led infrarrojo para indicar la distancia a través de la reflexibidad del objeto.
En caso de que ese objeto reflexivo sea excesivamente diferente en material, color u otro, para disminuir la desviación de la distancia que mide, es recomendado para fijar el sensor que la dirección al objeto entre el centro del emisor y el centro del detector este en paralelo.
Fig. 33
Para disminuir la desviación de la distancia que mide por el movimiento del objeto reflexivo, es recomendado fijar el sensor en la dirección móvil del objeto y la línea entre el centro del emisor y el centro del detector.
Fig. 34
B.8.11. Sensor de presión
Los sensores de presión sofisticados funcionan a base de celdas de carga y de sus respectivos amplificadores electrónicos, y se basan en el conocido puente de Wheatstone, donde una de sus piernas está ocupada por el sensor. Este sensor es básicamente una resistencia variable en un sustrato que puede ser deformado, y lo cual ocasiona el cambio en el valor de la mencionada resistencia.
Los sensores comunes de presión son interruptores eléctricos movidos por una membrana o, un tubo Bourdón. El tubo Bourdón se abre hacia afuera con el aumento de presión y este movimiento es transmitido a un interruptor, el cual es accionado cuando la posición del tubo corresponde con un ajuste preseleccionado.
En el caso de los interruptores de presión por diafragma, la fuerza provocada por la presión censada actúa sobre un resorte, el cual al ser vencido actúa sobre un microinterruptor. Es obvio que el resorte determina el rango de presión de operación.
B.8.12. Sensor de nivel
Los sensores de nivel en su mayoría trabajan indirectamente censando la posición de un flotador mediante un sensor inductivo o un interruptor del tipo de canilla ("reed") y un imán permanente.
B.8.13. Sensor de flujo
Los sensores de flujo más usuales comprenden de una pequeña turbina que gira dentro del fluido a censar, y, de un sensor del tipo inductivo que censa el número de revoluciones de los álabes de la turbina, o, en otro tipo, la señal es tomada de un tacogenerador acoplado directamente a la turbina.
También los hay del tipo de estado sólido, los cuales tienen en la cabeza tensora dos resistencias calibradas. Con una de ellas se calienta un poco el fluido que rodea la cabeza y con el otro se censa la temperatura del fluido. Comparando la temperatura electrónicamente, la cual se ajusta manualmente, es posible detectar movimientos de fluidos muy lentos como los de lubricantes de baleros, o flujos muy rápidos como los de una bomba de agua.
C. CONCLUSIONES
En una Argentina depresiva como la que hoy nos toca vivir, se nos abre en materia de informática industrial una gran oportunidad de crecimiento y desarrollo profesional que en épocas de bonanza nunca se hubiera dado. A primera vista la palabra depresión y desarrollo son antagónicas, pero en nuestro mercado no se da así, estamos viviendo un tiempo económico recesivo donde todo aquello que antes se importaba "MADE IN …" hoy por los valores en que cotiza nuestra moneda con respecto al dólar es imposible.
Esto abre un gran espectro de posibilidades ya que en muchos casos la inversión en equipamiento en las empresas está hecha, pero la explotación al 100 % de estos activos a través de un software desarrollado para tal fin tal vez nunca se llevo a cabo.
La realidad hoy nos dice que licenciar software directamente con los proveedores del hardware es muy costoso, por varios factores, desde el valor del software, la implementación y puesta en marcha hasta la consultoría, todos costos también en dólares.
Como pudimos ver a lo largo de este trabajo la información necesaria para poder desarrollar software que permita controlar y procesar información de equipamiento externo a la PC es factible y requiere de habilidades totalmente adquiridas en cualquier carrera universitaria de sistemas, como ser poder analítico, de investigación, de diseño de sistemas, de lenguajes de programación, etc. Solo basta con tener un buen proyecto en mano que surja a partir de la necesidad puntual o latente de algún cliente para poder, con la gran ayuda que hoy nos representa internet, desarrollar soluciones a medida.
Creemos que esto es un gran desafío para generar nuevas fuentes de trabajo que permitan desarrollar el área de informática con recursos nacionales, dándole la espalda a la actual recesión económica que impera en nuestro país.
D. REFERENCIAS
http://www.ssdnet.com.ar/unixcap/artic1.htm
http://www.mathworks.es/products/t_m/
http://www.ifent.org/lecciones/digitales/secuenciales/converta_d.htm
http://det.bp.ehu.es/vhdl/pagina/express/02.htm
http://wgpi.tsc.uvigo.es/gpi/miembros/personales/jvazquez/memoria/node1.html
http://www.micropik.com/pagsensores.htm
http://www.geocities.com/CollegePark/Den/1108/autoindus/auto4senso.html
Otros manuales de referencias utilizados